
Projektas #1: Sukalibruokite vykdomuosius variklius nenaudodami mechanini? stabdikli?
Surenkant „Arm Robot“ roboto rank?, sukalibruosite 4 ?montuotus vykdomuosius variklius. Tinkamas vykdom?j? varikli? veikimas priklausys nuo sukalibravimo.
SUD?TINGUMO LYGIS: Pradedantiesiems.
PRATIMO TRUKM?: 60 min.
MEDŽIAGOS:
- 1 Vykdomasis variklisr
- 1 „Build & Code UNO“ plokšt?
- 1 jutiklio apsauga
- 1 USB kabelis
Kas yra vykdomasis variklis?
Vykdomasis variklis yra nuolatin?s srov?s variklis, kuris yra sukonstruotas taip, kad sukt?si ne nuolat, o pasisukt? konkre?iu kampu, kur? nurodo valdymo signalas, ir pasilikt? toje pad?tyje.
Vykdomojo variklio dalys:
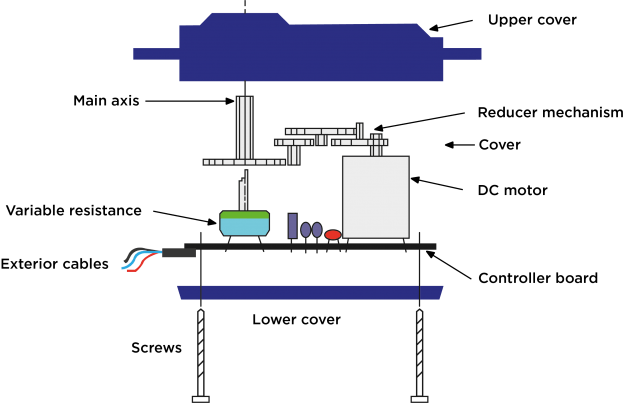
Yra dviej? tip? vykdomieji varikliai: su mechaniniais stabdikliais ir be mechanini? stabdikli?. Vykdomasis variklis su mechaniniu stabdikliu gali maksimaliai pajud?ti 180°. Tuo tarpu, vykdomasis variklis be mechaninio stabdiklio gali apsisukti visiškai. Galite patikrinti, kurio tipo vykdomasis variklis yra j?s? „Arm Robot“ roboto rankos rinkinyje, ?statydami vien? iš trij? balt? dali? ? vykdomojo variklio aš? ir j? pasukdami. Tokiu b?du j?s patikrinsite, koks yra sukimosi kampas ir ar vykdomasis variklis yra su mechaniniu stabdikliu ar be jo.
Kontrolin? signal? pateikia skaitmenini? kontakt? PPM. Norint valdyti vykdom?j? varikl?, impulsai siun?iami kas 20 ms, 50 Hz. Impulso plotis nustatys sukimosi kamp?, kuris yra vadinamas PPM. Šis plotis kinta priklausomai nuo kiekvieno vykdomojo variklio, bet paprastai jis yra tarp 0,5 ir 2,5 ms. Tai suteikia vykdomajam varikliui veikimo diapazon?, kad jis gal?t? jud?ti nuo 0º (impulsas, kurio plotis 0,5 ms) iki maksimalaus kampo, kuris paprastai yra 180° (impulsas, kurio plotis 2,5 ms).
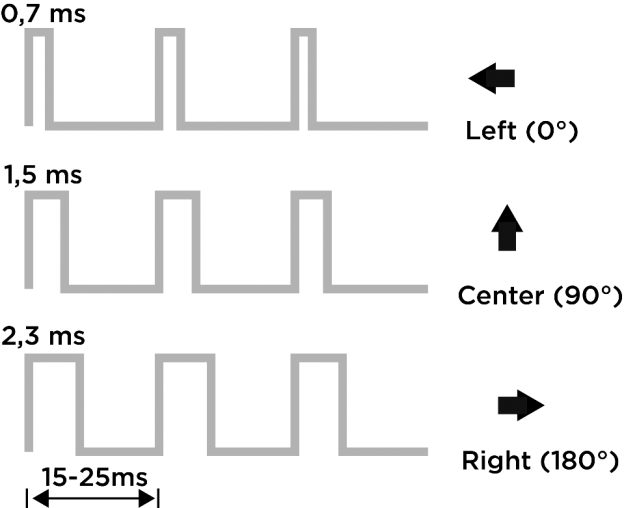
Nedideli vykdomieji varikliai , tokie kaip ir esantys „Arm Robot“ roboto rankos rinkinyje, veikia su 5V. Valdymas atliekamas per „Build & Code UNO“ plokšt?s skaitmenin? PPM, kuriame impulso plotis nustato vydomojo variklio pasukimo kamp?.
Vykdomasis variklis turi 3 kontaktus: 1 raudon? (5V), 1 rud? arba juod? (?žeminimas) ir 1 gelton? arba balt? (Valdymas).
PROGRAMOS KODAS
„Arduino“ kodas
Prieš pradedami surinkin?ti „Arm Robot“ roboto rank?, atlikite šiuos veiksmus:
- Parsisi?skite ir ?diekite „Arduino IDE“ program?. Ji si?loma „Windows“, „Mac OS“ ir „Linux“.
- Paleiskite „Arduino“ program? ir nukopijuokite ? j? toliau pateikt? program?:
#include <Servo.h> Servo motor1,motor2, motor3, motor4; int degree1 = 15, degree2 = 15, degree3 = 15, degree4 = 180 ; void setup() { // put your setup code here, to run once: Serial.begin (9600); motor1.attach (6); motor2.attach (9); motor3.attach (10); motor4.attach (11); } void loop() { // put your main code here, to run repeatedly: motor1.write (degree1); motor2.write (degree2); motor3.write (degree3); motor4.write (degree4); } - Suraskite „Arm Robot“ roboto rankos rinkinyje esan?ias „Build & Code UNO“ plokšt? ir jutikli? apsaugos plokšt?.
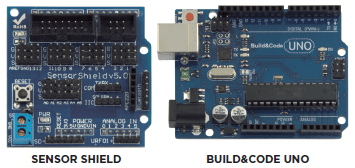
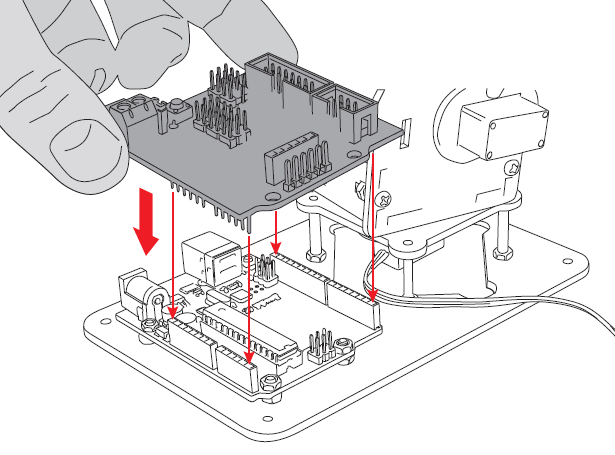
- Užd?kite apsaugos plokšt? ant „Build & Code UNO“ plokšt?s ir ?sitikinkite, kad kontaktai yra sulygiuoti. Atskaitai naudokite varžt? skyles.
- Prijunkite „Build & Code UNO“ plokšt? prie kompiuterio, naudodami „Arm Robot“ roboto rankos rinkinyje esant? USB kabel?.
- ?kelkite ? „Build & Code UNO“ plokšt? program?, kuri? j?s nukopijavote „Arduino“, atlikdami šiuos veiksmus:
6.1 Sukonfig?ruokite „Arduino IDE“ darbui su „Build & Code 4in1“ plokšte: atverkite viršutiniame meniu esan?i? parinkt? „?rankiai“, spustel?kite „Plokšt?“ ir pasirinkite „Arduino / Genuino Uno“ parinkt?.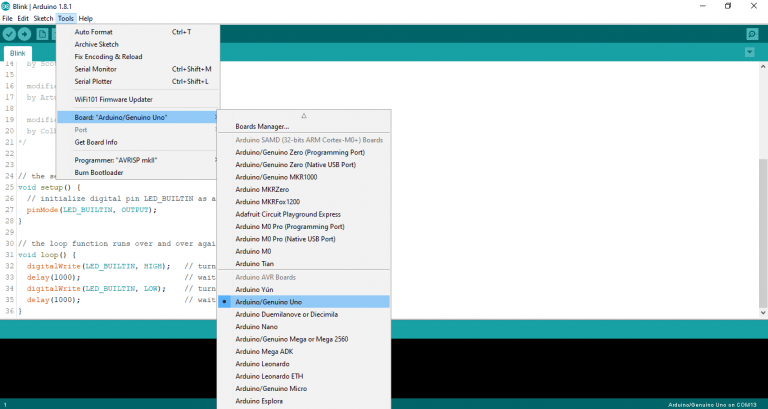
6.2 Sukonfig?ruokite darbin? jungt? „Build & Code“ plokšt?je: atverkite meniu parinkt? „?rankiai“, spustel?kite „Jungtis“ ir pasirinkite jungt?, prie kurio plokšt? yra prijungta.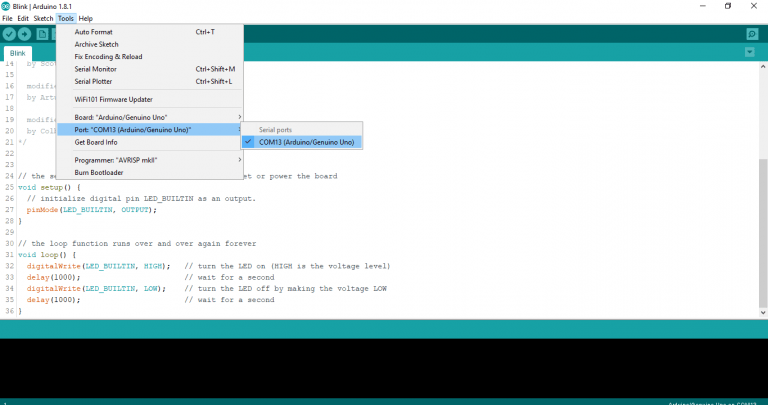
Pastaba: jei nesate tikri, kuri jungtis yra prijungta prie plokšt?s, prijunkite j? ir atjunkite, tada patikrinkite, kuri jungtis yra rodoma ir išnyksta iš meniu.
6.3 Paspauskite ant horizontalios m?lynos rodykl?s, pažym?tos kitame paveiksl?lyje raudonu sta?iakampiu: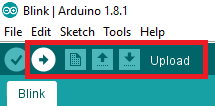
J? ?k?lus, bus rodomas pranešimas „?k?limas užbaigtas“. Dabar programa yra „Buil & Code“ plokšt?je.
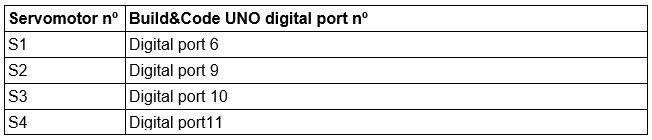
- T?skite „Arm Robot“ roboto rankos surinkim?, kol kiekvienam iš 4 vykdom?j? varikli? pasieksite žingsn? „Sukalibruokite vykdom?j? varikl?“. J? pasiek?, kiekvien? vykdom?j? varikl? prijunkite prie atitinkamos jutikli? apsaugos plokšt?s jungties, kaip nurodyta toliau pateiktoje diagramoje. ?sitikinkite, kad jutiklio apsaugos plokšt? yra teisingai prijungta prie „Build & Code UNO“ plokšt?s. Pastaba: Atminkite, kad norint sukalibruoti vykdomuosius variklius, turite prijungti kompiuter? prie „Build & Code UNO“ plokšt?s, naudodami USB kabel?. Tokiu b?du teiksite maitinim? visai sistemai.
Prisiminkite jung?i? pad?t?. Galite patikrinti j? pagal š? paveiksl?l?:
- Prijungtas vykdomasis variklis bus pad?tyje „Jud?jimas sustabdytas“.
- 9. ?statykite detal?, kuri yra montuojama ? vykdomojo variklio aš?, pagal instrukcij? vadov?. Tam, kad tinkamai ?statytum?te detal? steb?kite paveiksl?lius.
S1 ? Pastatykite roboto rank? 90° kampu, kaip parodyta paveiksl?lyje. Jos žnypl?s turi b?ti nukreiptos ? dešin?.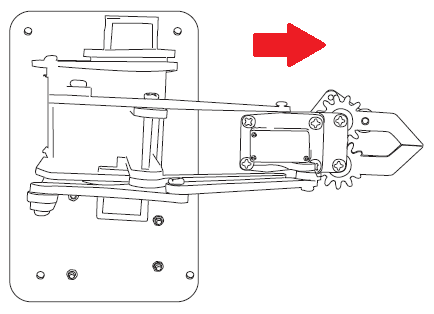
S2 ? Pastatykite D5 dal? ? paveiksl?lyje parodyt? pozicij? parodytu 90° kampu.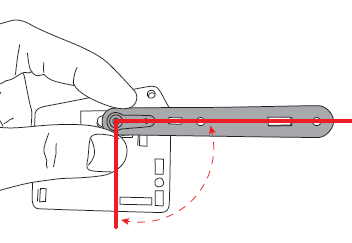 S3 ? ?statykite detal? ? paveiksl?lyje parodyt? pad?t? jame parodytu kampu.
S3 ? ?statykite detal? ? paveiksl?lyje parodyt? pad?t? jame parodytu kampu.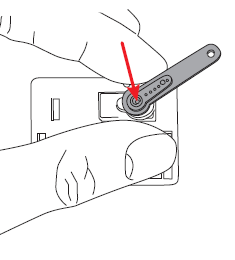
S4 ? Pritvirtinkite dal? prie vykdomojo variklio rotoriaus ašies naudodami maž? varžt?, kaip parodyta.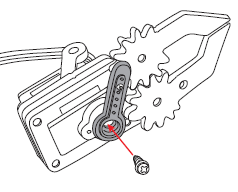
- Kiekvien? detal? prisukite prie vykdomojo variklio ašies. Naudokite mažiausi? vykdom?j? varikli? plastikiniuose maišeliuose esant? atsuktuv?.
- Atjunkite USB kabel? nuo kompiuterio, kad sustabdytum?te energijos perdavim? ? „Build & Code UNO“ plokšt?.
- Atjunkite vykdom?j? varikl? ir toliau konstruokite „Arm Robot“ roboto rank?.
- Pakartokite 7-12 veiksmus su kiekvienu vykdomuoju varikliu. Patikrinkite, kur? vykdom?j? varikl? kalibruojate šiuo metu, prie kurios jungties jis tur?t? b?ti prijungtas ir kokia yra detal?s, kuri turi b?ti sureguliuojama pagal aš?, pad?tis.
PRATIMO REZULTATAS:
Dabar, kai surinkote „Arm Robot“ roboto rank?, atlikite 2-6 projektus ir patikrinkite, ar „Arm Robot“ roboto rankos judesiai yra teisingi. Jei ji nejuda tinkamai, patikrinkite visus 1 projekte aprašytus veiksmus.