
Projektas #2: Užprogramuokite vairasvirt?
Sukonstruokite ir užprogramuokite grandin?, analogin?s vairasvirt?s, kuri yra „Arm Robot“ roboto rankos rinkinyje. Pajudinkite vairasvirt? abiem jos ašimis, atleidus, jos pad?ties vert?s bus rodomos ekrane.
SUD?TINGUMO LYGIS: Pradedantiesiems.
PRATIMO TRUKM?: 20 min.
MEDŽIAGOS:
- 1 Vairasvirt?
- 1 „Build & Code UNO“ plokšt? /li>
- 1 jutiklio apsauga
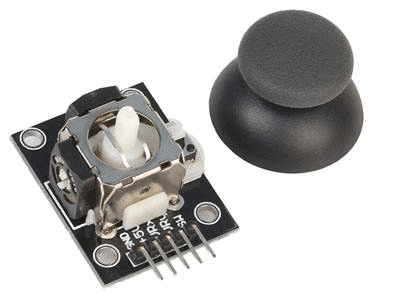
Kas yra analogin? vairasvirt??
Vairasvirt? yra analoginis valdiklis, kuris gali b?ti judinamas aplink 360laipsni? kampu ir leidžia valdyti daugel? ?rengini?. Jis dažniausiai naudojamas vaizdo žaidim? ?renginiuose, ta?iau j? taip pat galite naudoti nor?dami lengvai valdyti robotus ar kitas mašinas.
Vairasvirt? yra sudaryta iš kreipimo sistemos su 2 statmenomis ašimis, prijungtos prie 2 potenciometr?. Šie potenciometrai matuoja vairasvirt?s X ir Y aši? pad?t?.
Viena ašis yra nustatoma per mikro jungikl?, kuris jums leidžia aptikti moment?, kai vairasvirt? yra paspaudžiama.
Vairasvirt? kiekvienai ašiai siun?ia analogin? signal?, o vairasvirt? paspaudus - skaitmenin?.
JUNGTYS:
- Prijunkite vairasvirt? prie „Build & Code“ jutikli? apsaugos, kuri tur?t? b?ti prijungta prie „Build & Code UNO“ plokšt?s, kaip parodyta „Arm Robot“ roboto rankos naudotojo instrukcijos 14 veiksme.
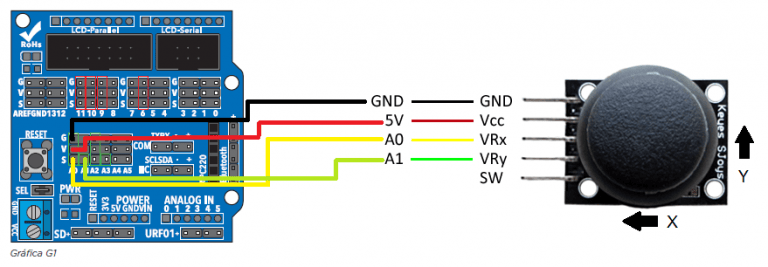
- Kad gal?tum?te valdyti vairasvirt?, prijunkite Vcc išvest? (raudonas kabelis) prie analogin?s A0 jungties V kontakto. Taip pat prijunkite ?ŽEMINIMO išvest? prie „Build & Code“ analogin?s jungties G kontakto
- Prijunkite VRx išvest? (geltonas kabelis) prie A0 analogin?s jungties S kontakto. Taip pat prijunkite VRy išvest? (žalias kabelis)prie A1 analogin?s jungties S kontakto.
- Norint patikrinti, ar jungtys yra prijungtos teisingai, atverskite „Arm Robot“ roboto rankos vadovo skyriaus „Jungtys“ poskyr? „Vairasvirt?s jungtys“.

PROGRAMOS KODAS
Galite atlikti š? projekt? naudodami „Arduino“ program? arba suderinam? vaizdin? programavimo programin? ?rang?, naudojan?i? blokus. Toliau pateikiamas reikiamas kodas.
„Arduino“ kodas
Prieš pradedant surinkin?ti „Arm Robot“ roboto rank?, atlikite šiuos veiksmus:
- Parsisi?skite ir ?diekite „Arduino IDE“ program?. Ji si?loma „Windows“, „Mac OS“ ir „Linux“.
- Paleiskite „Arduino“ program? ir nukopijuokite ? j? toliau pateikt? program?:
#include <Servo.h> int valueX = 0; // X-AXIS LECTURE int valueY = 0; // Y-AXIS LECTURE int pinJX = A0; // X-AXIS CONNECTED TO ANALOG PIN A0 int pinJY = A1; // Y-AXIS CONNECTED TO ANALOG PIN A1 void setup() { Serial.begin (9600); // ACTIVATE COMMUNICATION BY SERIAL PORT } void loop() { valueX = analogRead ( pinJX);// ANALOG A0 READING FOR X-AXIS valueY = analogRead ( pinJY); // ANALOG A1 READING FOR Y-AXIS Serial.print ("X: "); Serial.print (valueX); // PRINT ONSCREEN THE X-AXIS VALUES FROM 0 TO 1023 Serial.print("\t"); Serial.print ("Y: "); Serial.println (valueY);// PRINT ONSCREEN THE Y-AXIS VALUES FROM 0 TO 1023 } - Nor?dami pamatyti ekrane pateikiamas reikšmes, spustel?kite didinamojo stiklo piktogram? ir langas bus atvertas:

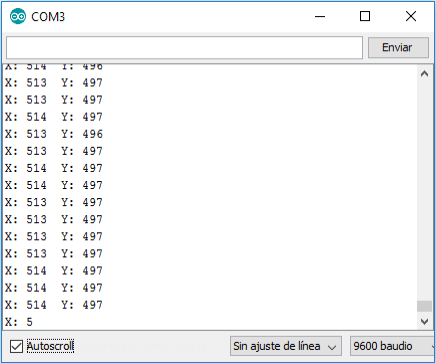
Kreipdami vairasvirt? ? dešin?, ? kair?, aukštyn arba žemyn, pamatysite, kaip X ir Y reikšm?s kei?iasi nuo 0 iki 1023. Pavyzdys:
Kodas vaizdinio programavimo programinei ?rangai naudojan?iai blokus
- Parsisi?skite ir ?diekite program?..
1.1 Paleiskite programin? ?rang?
1.2 Sukonfig?ruokite program?, kad išsaugotum?te kod? „Build & Code UNO“ plokšt?je. Instrukcijos pateikiamos „Arm Robot“ roboto rankos vadovo pirmuosiuose veiksmuose. - Paleiskite program? ir nukopijuokite toliau pateikt? kod?. Naudokite š? paveiksl?l? kaip vadov?:

PRATIMO REZULTATAS:
Kreipiant vairasvirt? ? dešin?, ? kair?, aukštyn ir žemyn, pamatysite, kaip X ir Y kintamieji kinta tarp 0 ir 1023.
Tai yra pirmas žingsnis siekiant suprasti, kaip užprogramuoti vairasvirt? ir kokius duomenis gauname „Arm Robot“ roboto rankos užprogramavimui, kad ji atlikt? judesius, kuri? norime.