
Projektas #3: Valdykite vykdom?j? varikl?
Išmokite valdyti vykdomojo variklio pad?t? naudojant „Arduino“ bibliotek?.
SUD?TINGUMO LYGIS: Pradedantiesiems.
PRATIMO TRUKM?: 20 min.
MEDŽIAGOS:
- 1 Vykdomasis variklis
- 1 „Build & Code UNO“ plokšt?
- 1 Jutiklio apsauga
- 1 USB - USB B tipo kabelis /li>
- 1 Kompiuteris
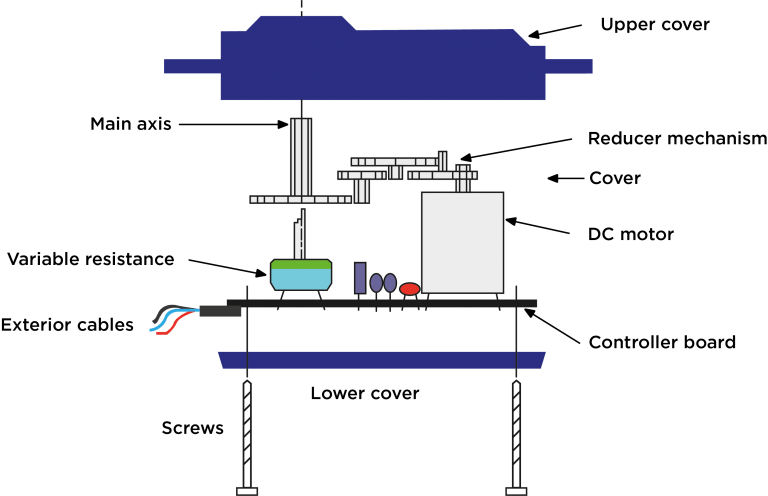
Kas yra vykdomasis variklis?
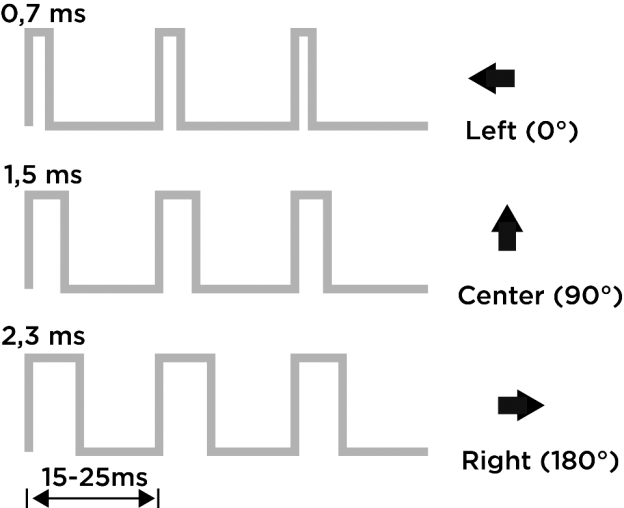
Vykdomasis variklis yra NS variklis, kuris yra sukonstruotas taip, kad sukt?si ne nuolat, o pasisukt? konkre?iu kampu, kur? nurodo valdymo signalas, ir pasilikt? toje pad?tyje.
Š? signal? siun?ia PPM skaitmeniniai kontaktai. Norint valdyti vykdom?j? varikl?, impulsai siun?iami kas 20 ms, iki 50 Hz. Impulso plotis nustatys sukimosi kamp?, vadinam? PPM. Šis plotis gali skirtis, bet paprastai jis yra tarp 0,5 ir 2,5 ms. Tai suteikia vykdomajam varikliui veikimo diapazon?, kad jis gal?t? jud?ti nuo 0º (impulsas, kurio plotis 0,5 ms) iki maksimalaus kampo, kuris paprastai yra 180° (impulsas, kurio plotis 2,5 ms).
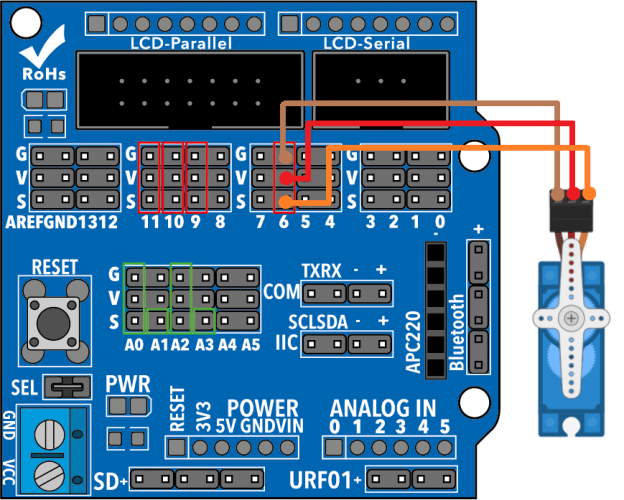
Vykdomasis variklis turi 3 kontaktus: 1 raudona (5V), 1 ruda arba juoda (?žeminimas) ir 1 geltona arba balta (Valdymas).
JUNGTYS::
- The Rudas kabelis atitinka vykdomojo variklio ?ŽEMINIMO kontakt?. Prijunkite j? prie G kontakto, esan?io „Build & Code UNO“ plokšt?s 6 jungtyje.
- The Raudonas kabelis atitinka 5V kontakt?. Prijunkite j? prie V kontakto, esan?io „Build & Code UNO“ plokšt?s 6 jungtyje.
- The Oranžinis kabelis atitinka signal?. Prijunkite j? prie S kontakto, esan?io „Build & Code UNO“ plokšt?s 6 jungtyje.
„Arduino“ kodas
Prieš pradedant surinkin?ti „Arm Robot“ roboto rank?, atlikite šiuos veiksmus:
- Parsisi?skite ir ?diekite „Arduino IDE“ program?. Ji . Ji si?loma „Windows“, „Mac OS“ ir „Linux“.
- Paleiskite „Arduino“ program? ir nukopijuokite ? j? toliau pateikt? program?:
#include <Servo.h> Servo motor1; // DECLARE SERVO 1 int degree1 = 0; // SERVO 1 DEGREES void setup() { motor1.attach (9); // PWM DIGITAL PIN 9 WHERE SERVO 1 IS CONNECTED } void loop() { degree1 = 0; motor1.write (degree1); // SEND DEGREES TO SERVO 1 delay(1000); // WAIT 1 SECOND ON THIS POSITION degree1 = 60; motor1.write (degree1); delay(1000); degree1 = 120; motor1.write (degree1); delay(1000); degree1 = 180; motor1.write (degree1); delay(1000); degree1 = 120; motor1.write (degree1); delay(1000); degree1 = 60; motor1.write (degree1); delay(1000); }
Kodas vaizdinio programavimo programinei ?rangai naudojan?iai blokus
- Parsisi?skite ir ?diekite program?..
1.1 Paleiskite programin? ?rang?
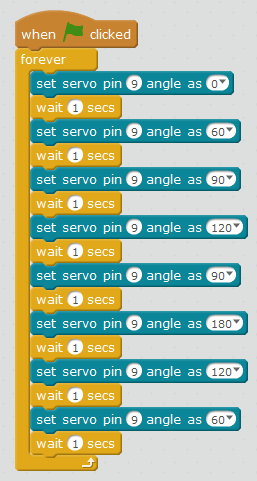
1.2 Sukonfig?ruokite program?, kad išsaugotum?te kod? „Build & Code UNO“ plokšt?je. Instrukcijos pateikiamos „Arm Robot“ roboto rankos vadovo pirmuosiuose veiksmuose. - Paleiskite program? ir nukopijuokite toliau pateikt? kod?. Naudokite š? paveiksl?l? kaip vadov?:
PRATIMO REZULTATAS:
Išmokote naudotis Servo.h biblioteka „Arduino“ programavimo programin?je ?rangoje. Kai biblioteka bus ?diegta, gal?site programuoti ir valdyti vykdom?j? varikl? „Arduino“ ir vaizdinio programavimo programin?je ?rangoje naudojan?ioje blokus.